
Digitális eszközök órák az első évfolyamon
A 2023/24 tanévben előszőr órarendbe ütemezve digitális eszközök néven, a diákok micropython nyelven EV3 Mindstorms LEGO robotot programozhattak. A programozás VisualStudio Code programban történt. A tantárgynak célkitűzése volt, hogy a diákok problémamegoldó képességét, csapatmunkáját az életből vett példákon keresztül fejlesszük. Az órákon a STEM módszertannal dolgoztunk.
A STEM módszertan a természettudományok (Science), technológia (Technology), mérnöki tudományok (Engineering) és matematika (Mathematics) integrált oktatására utal. Lényegi elemei:
- Interdiszciplinaritás: A STEM módszertan lényege, hogy a különböző tudományterületeket integrált módon tanítja, nem különálló tantárgyakként. Ez azt jelenti, hogy a diákok gyakran olyan projekteken dolgoznak, amelyek több területet is lefednek.
- Problémamegoldás: A STEM oktatás nagy hangsúlyt fektet a gyakorlati, valós életből vett problémák megoldására. Ez fejleszti a diákok kritikus gondolkodását és kreativitását.
- Aktív tanulás: A STEM órákon a diákok aktívan részt vesznek a tanulási folyamatban, például kísérleteket végeznek, modelleket építenek, vagy szimulációkat futtatnak. Ez az aktív részvétel mélyebb megértést és nagyobb elkötelezettséget eredményez.
- Kollaboráció: A STEM oktatásban gyakran dolgoznak a diákok csoportokban, amely fejleszti a csapatmunkát és a kommunikációs készségeket. A kollaboráció során különböző nézőpontokkal találkoznak, és megtanulják, hogyan lehet hatékonyan együttműködni.
- Technológiai eszközök használata: A modern technológiai eszközök (például számítógépek, programozható robotok, 3D nyomtatók) integrálása az oktatásba segíti a diákokat abban, hogy gyakorlati készségeket szerezzenek, amelyeket a későbbi karrierjük során is használhatnak.
- Készségek fejlesztése: A STEM nemcsak a szaktudást fejleszti, hanem olyan általános készségeket is, mint a kritikus gondolkodás, a problémamegoldó képesség, az innováció, a kommunikáció és az együttműködés.
Összességében a STEM módszertan célja, hogy felkészítse a diákokat a 21. század munkaerőpiacának kihívásaira, ahol az interdiszciplináris tudás és a gyakorlati készségek egyre fontosabbá válnak.
Az félév elején megismerkedtünk a robotok segítségével az önvezető autók irányításának problémáival. A csapattagok ekkor még csak ismerkedtek egymással. A félév elején felfedező módszerrel, kísérleteket folytattunk a motorok mozgatására, a hivatalos dokumentáció segítségével több parancsot is kipróbáltunk. Együtt, és külön-külön mozgattuk a motorokat, fix és változó pályákat is bejártunk. A tananyagot a pénzhétre szervezett robot teve verseny programunk zárta. Itt az egyes csapataink (2-3 fő) megegyező konstrukciójú robottevékkel indultak (EV3 alap robot). A cél az volt, hogy olyan programot alkossanak, ami a leggyorsabban körbe megy a versenypályán, úgy, hogy a pályán belül marad, illetve a középső park területet nem érinti. A robottevékre, Boscolírával (az iskola ezen hétre tervezett pénzével) lehetett fogadni a befutóra.
A pályán való haladásra több elképzelés is született mind programozásilag, mind vezérelvként:
- az egyszerű szekvenciális programvégrehajtástól kezdve
- a ciklusba szervezett kódokon keresztül
- a mások kikerülését célzó kódok
- a leggyorsabb sebességet elérő kódok
- a legoptimálisabb útvonalat célzó kódok
A programokat minden csapat osztályokba rendezve hozta létre, és a rajtmezőn 3 pozíciónak megfelelően indította.
Adódott az ötlet, hogy a legegyszerűbb egy vonalat követve lenne bejárni a pályát. Így megismerkedtünk a szenzorokkal. A szenzorok megismerése közben, beszélgettünk önvezető, távtartó autókról, jelzésrendszert követő autókról. (adott útfestésre működő autókról) Ezeket gyakorlati példákon keresztül teszteltük. A szenzorokkal megvalósítottunk, szonár programot, kiírtuk a szenzorok értékeit mintha műszerfal lenne a téglánk.
A szenzorok megismerése közben készítettünk vonalkód leolvasó programot, ami képes volt hangjelzést adva visszaadni a vonalak vastagságát, vagy képként kiírni a beolvasott vonalkódot. A képkezelés során kikapcsolódásként véletlenszerűen célbadobtunk egy darts segítségével majd, a programozási tételeket felhasználva statisztikát készítettünk a dobásokról. A különböző eredményeinket, fájlokba rögzítettük, hangjelzésekkel tarkítottuk.
Utolsó feladatként a csapatok önállóan oldottak meg feladatokat még nem ismert robot funkciókkal, amit a dokumentációk tanulmányozásával tették, illetve chat gpt bevonásával. A legérdekesebb talán a robotok téglák közötti kommunikáció volt, ahol egy email levelezést szimuláltak a tanulók, hangjelzéssel kísérve.
Az utolsó 4 hétben a csapatok 2-3-asával házakba tömörültek. Minden csapatnak az volt a feladata, hogy egy megrendelő kérésére okos otthont vagy okos házat matassanak be neki. A megrendelőnek az volt a kikötése, hogy 3 emeletnél ne legyen magasabb a ház, funkcionalitásában feleljen meg a modern kor követelményeinek. A házak funkcionalitása csak a magántulajdonú földre vonatkozzon.
Munka szervezés szempontjából, a csapatokkal megismerkedtünk a Trello és Microsoft Planner alkalmazással (Git, GitHub, Teams rendszer mellé), ahol a csapatos feladatok menedzselésre kerültek. A csapatkommunikációk Temas csatornákban zajlottak, az ötleteket Trello-ban vitatták, rögzítették a diákok. A projekt teljes időtartalma alatt Planner alkalmazásba osztották a feladatokat, illetve menedzselték a változásokat.
A diákok csapat és házvezetőket választottak, majd megtervezték a házakat, ezek funkcióival, dokumentálták. A tervezés után a megvalósítás következett első körben mindenki a saját funkcióját, majd összeépítették a funkciókat. A munkát egy bemutató nap zárt, ahol a házak megmutatták egymásnak saját elképzeléseiket, fejlesztéseiket.




A munkák során egymást és magukat is értékelték, illetve tanári értékelés is történt. Ezek írásban, szóban, illetve óra végi gyors kézjelzés visszajelzéssel is történtek.
Diákok véleményei: Mi a véleményed a féléves digitális eszközök tantárgyról?
- „Érdekes volt számomra, mindenfélét csináltunk és tetszett hogy projekt munkát kaptunk.”
- ” Őszintén szólva nagyon tetszett. Régen foglalkoztatott a robotika. Először ilyen lego robotokat aikido táborban programoztam 12 évesen. Ezután a város könyvtárába jártam külön robotika szakra is egy ideig.”
- „Nagyon szuper volt.”
- „Elég új és érdekes tantárgynak tartom, nem gondoltam hogy lesz ilyenünk, én élveztem, remélem a jövőben lesz még hasonló”
- „izgalmas óra volt, örülök hogy részt vehettem benne”
- „Jók voltak ezek az órák, ha elakadtam néha, vagy tanárnő vagy egy csapattársam segített. Nekem tetszett ez az ötlet hogy okos otthon ötlet, kreatívkodhattunk. ”
- „Sok mindent meg tudtam tanulni a robot-programozás világáról. Csomó érdekes anyagot tudtam tanulni, amit lehet hogy néha nem fogok hasznát venni, de jó hogy valamit meg tudtam tanulni. A Planner-t egyszerű volt használni, és a legközelebb még a szakdogánál is hasznos lesz. Röviden ennyit tudok mondani”.
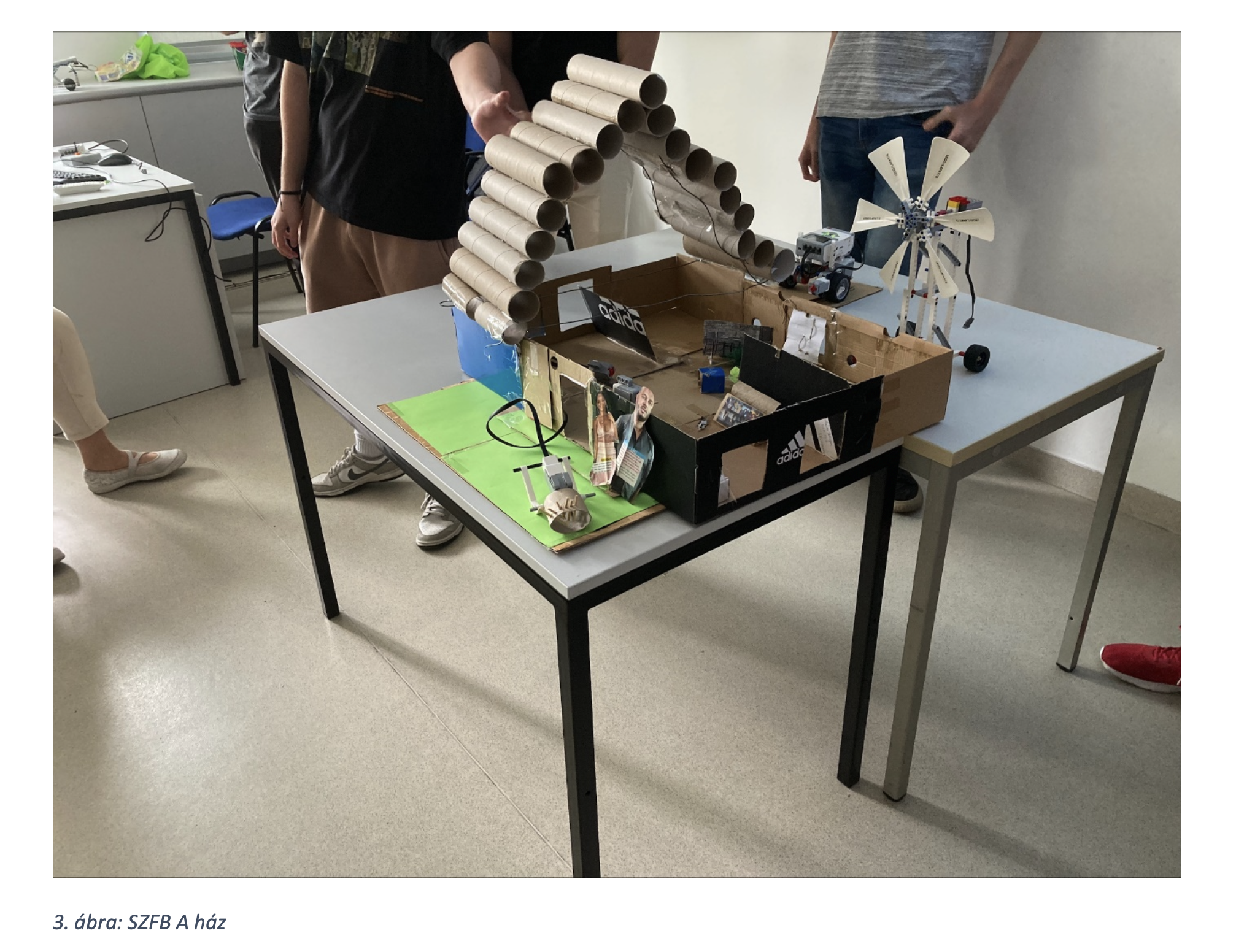
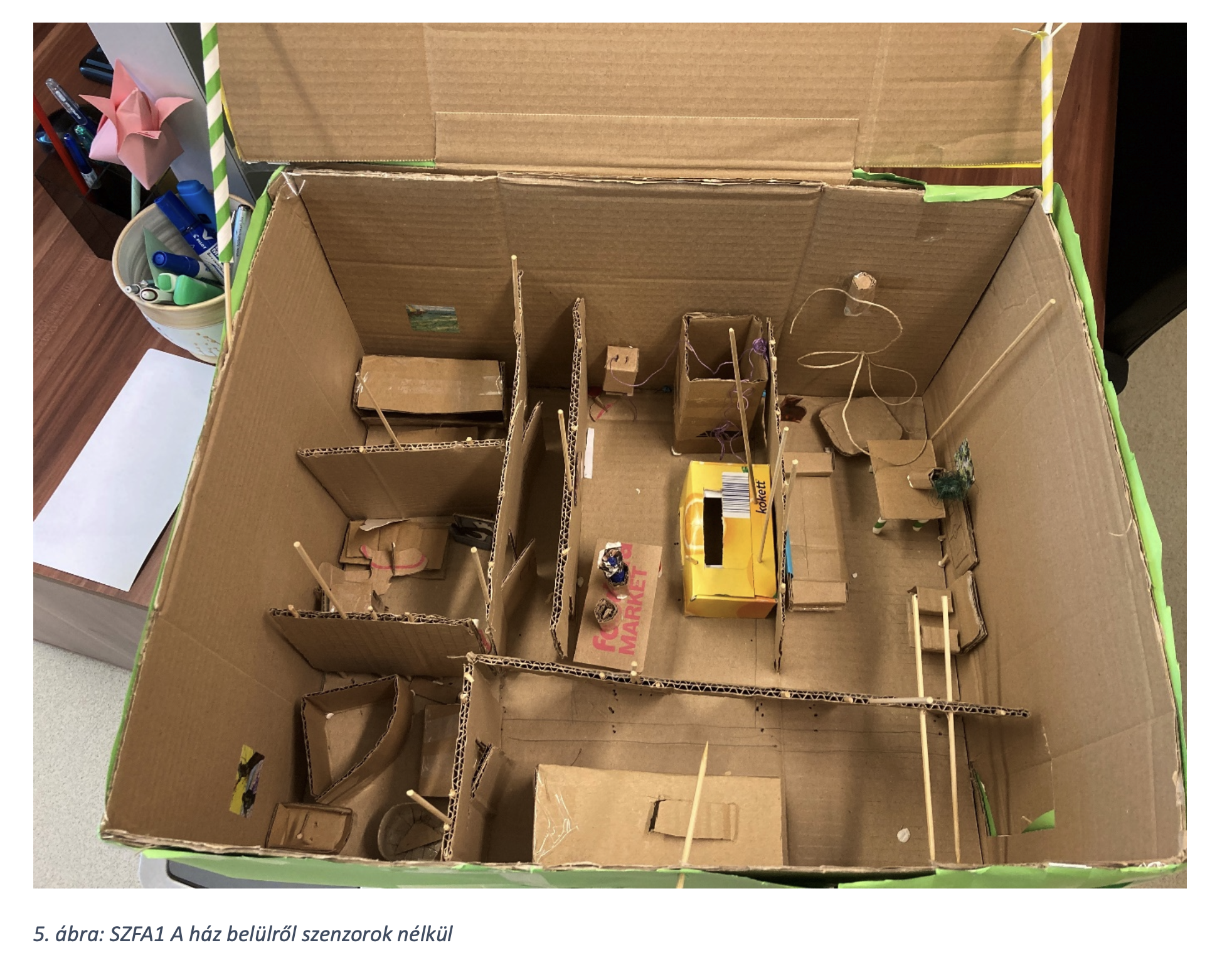
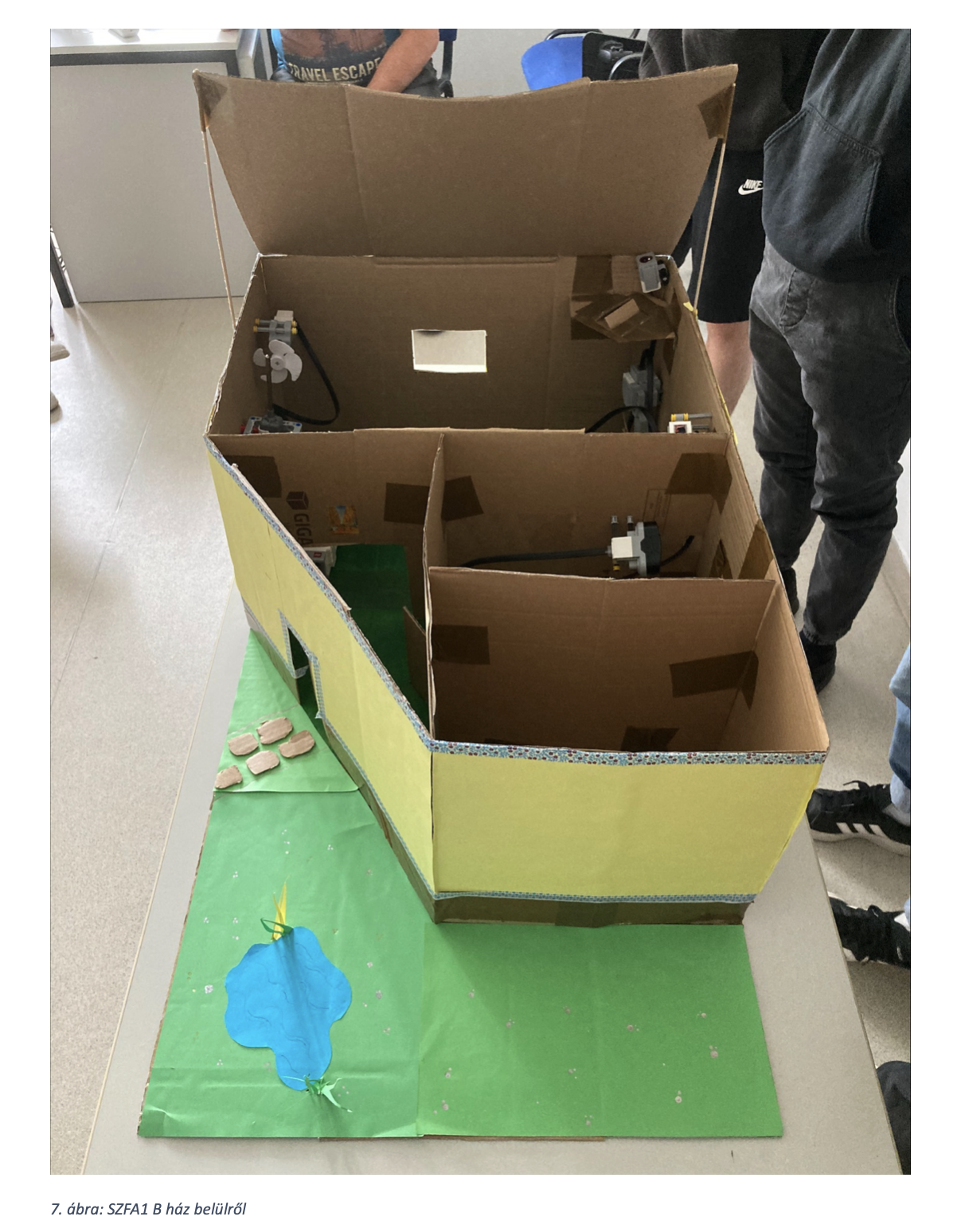
Házkészítés folyamatai képekben:















Csapat, ház tagok listája:
A2 csoport B ház házvezető: Pfiffer Attila
Csapatok:
I: Paróczi Levente Patrik, Pfiffer Attila
R2: Képiró Balázs, Szőlősi Bálint
IV: Kosztolányi Ákos, Lajkó Gergő, Simon Kende
A2 csoport A ház házvezető: Nádas Viktória
Csapatok:
II: Nádas Viktória, Kádár Kristóf, Tar Gergő
V: Földi Cintia, Néda Írisz
III: Kovács István, Lukács Alexandra, Polgár Botond
A1 csoport B ház házvezető: Ilyés Borbála
Csapatok:
II: Albert Orsolya, Horváth Nauzika
III: Ilyés Borbála, Dobszay Dorka
V: Ewemor Martin, Béldy Ádám, Boldizsár Gergely
A1 csoport A ház házvezető: Both Orsolya
Csapatok:
I: Both Orsolya, Bajári Gergő, Erdős Viktória
IV: Bitó Zalán, Fabu András, Dobos Dominik
B csoport B ház házvezető: Halász Gergő
Csapatok:
III: Szabó-Mester Alex, Sas Gyula, Ütő Imre
IV: Harman Patrik, Halász Gergő, Baksa Bence
R1: Szabó Roland, Rózsás Adrienn
B csoport A ház házvezető: Weimper Gergő
Csapatok:
II: Richter Balázs, Simon Gergő
V: Kocsi Dorka, Csorba Eszter
I: Weimper Gergő, Szalkai Viktória, Roszkopf Adél
R1: Szabó Roland, Rózsás Adrienn
Projekmendzsment
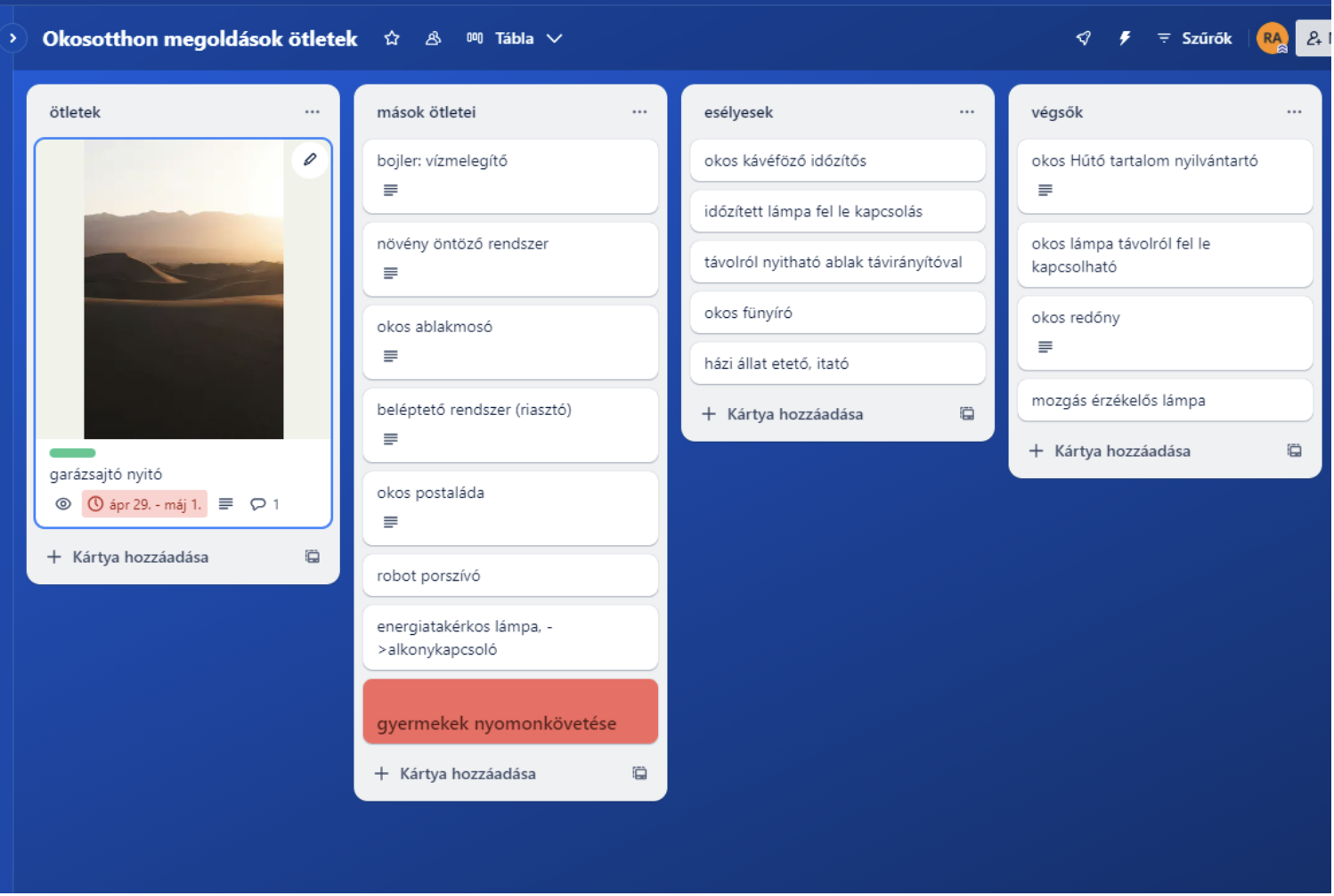
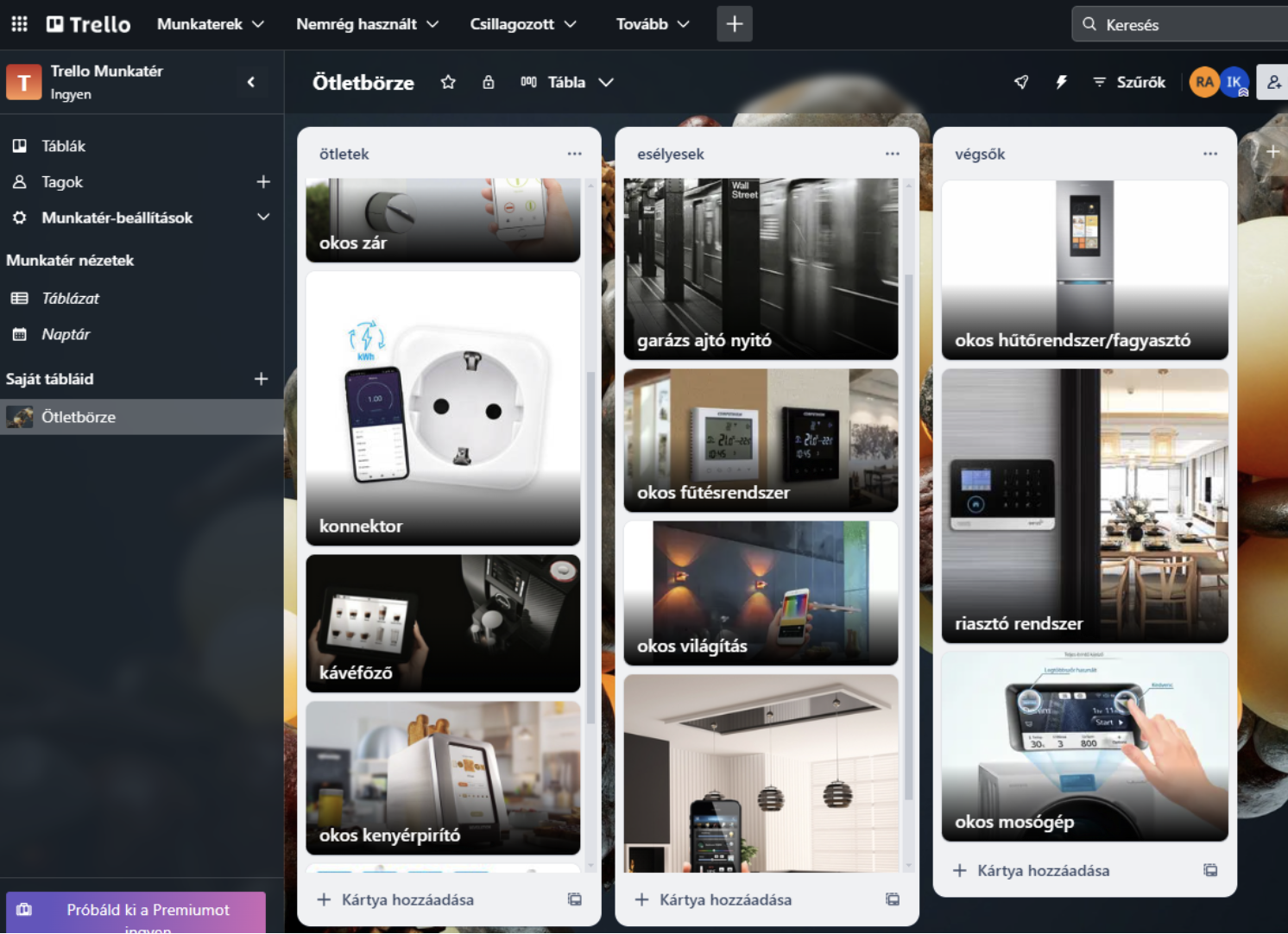
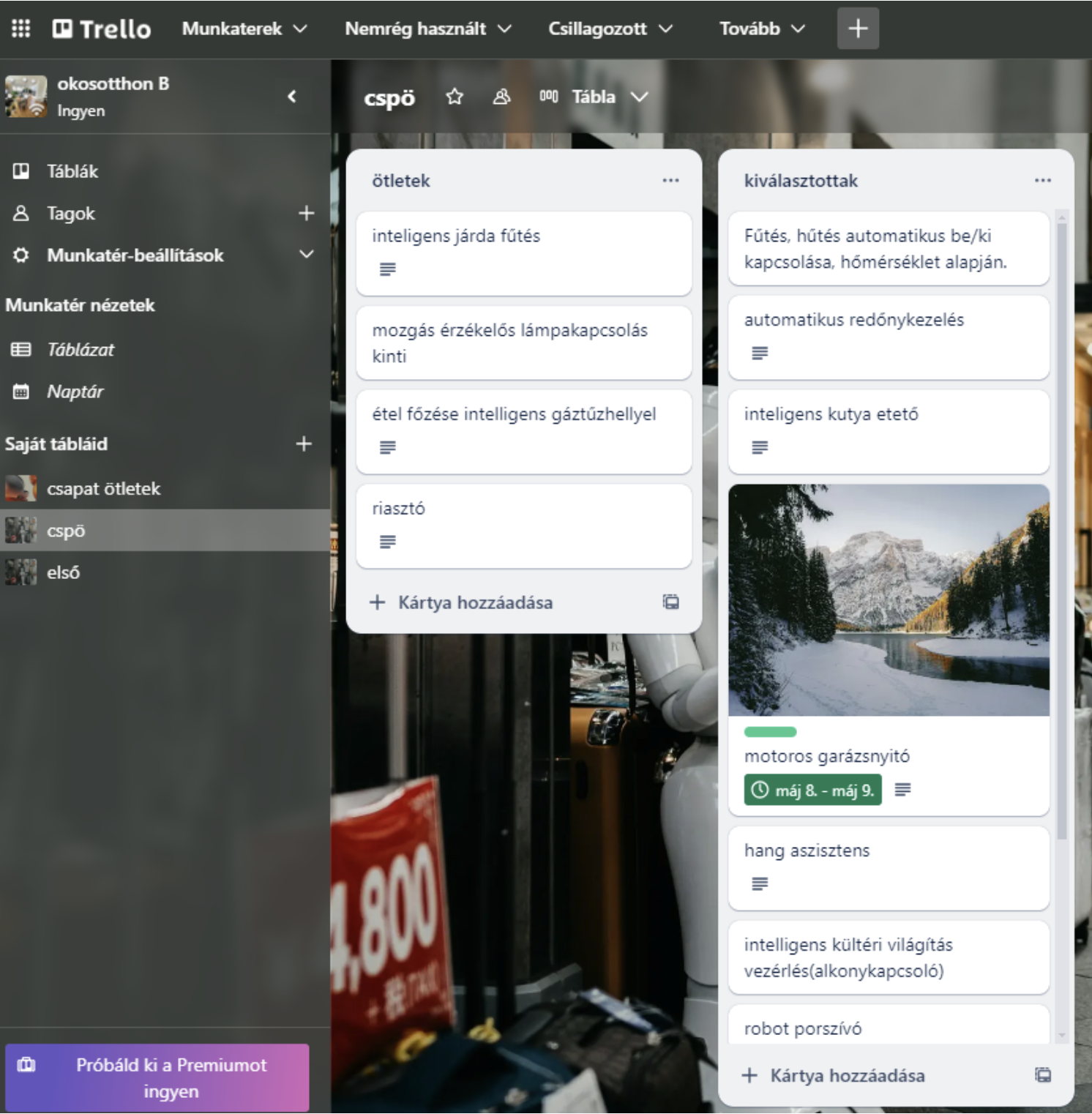
Trello: ötletek
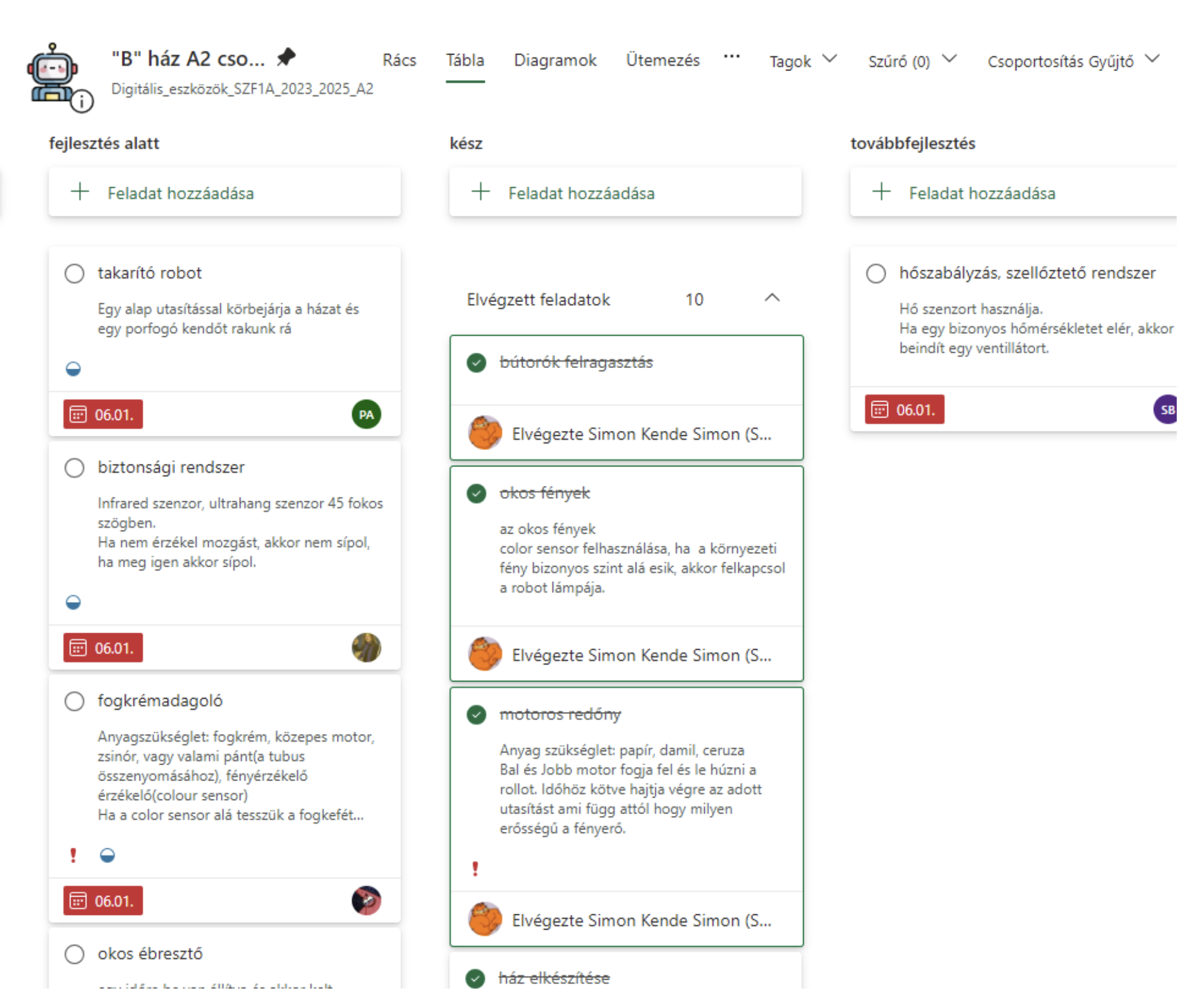
Planner: Összesítő nézet

Pillanatképek a csoprotok munkafelosztásáról

Dokumentáció
Okosház
Készítők:
Bajári Gergő
Bitó Zalán
Both Orsolya
Dobos Dominik
Erdős Viktória
Fabu András
Feladat bemutatása:
A feladat egy házmakett elkészítése volt, okosotthon funkciókkal felszerelve.
Tervek:
Kezdeti tervek:
Tervezett funkciók:
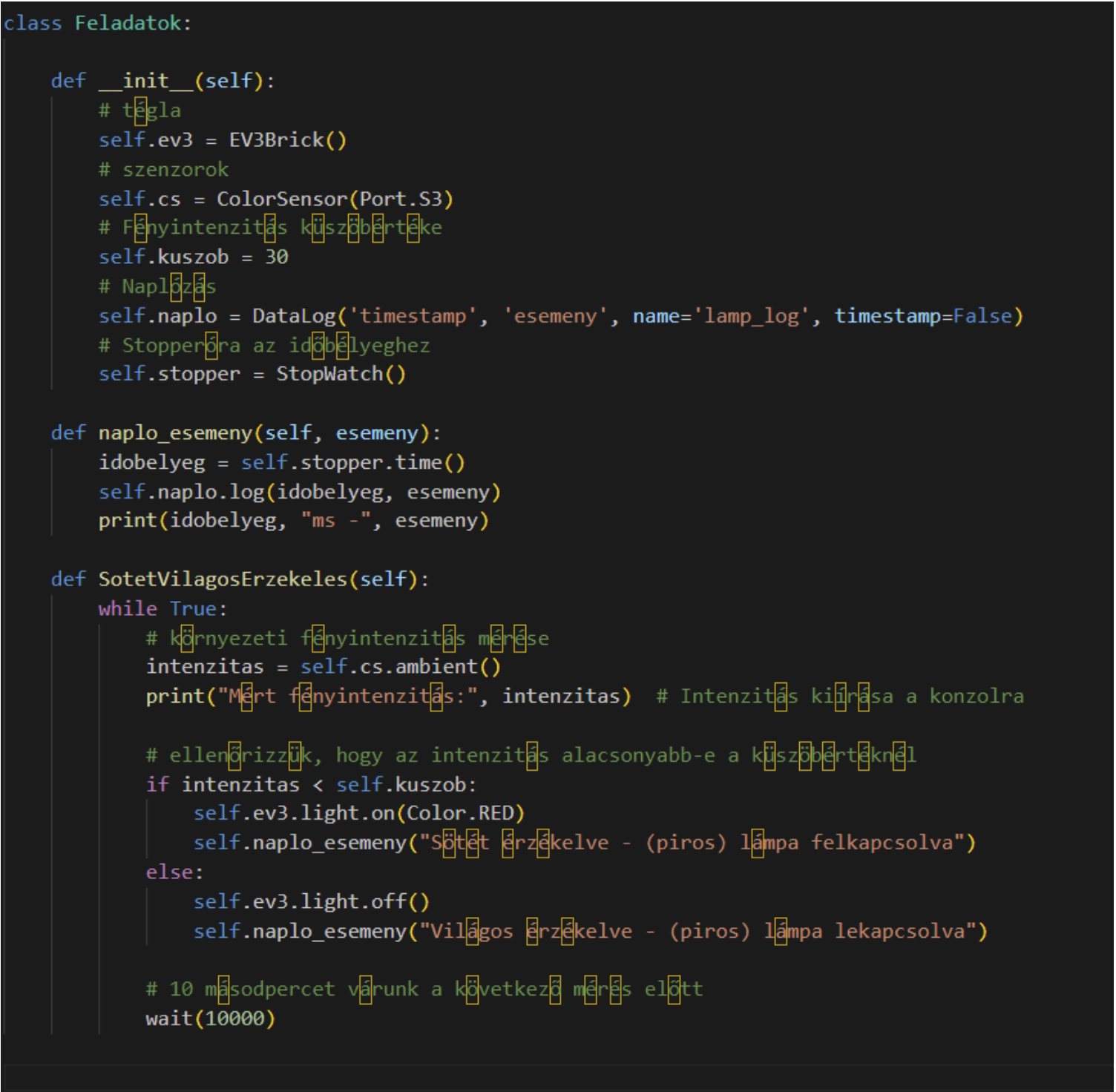
- Időzített lámpa fel-le kapcsolás
- Beállítod a kívánt időpontot, amikor szeretnéd, hogy a lámpa bekapcsoljon.
- Az időzítő beépített órája ekkor aktiválódik, és az előre beállított időpontban jelzi a lámpának, hogy kapcsoljon be.
- Ablak védő berendezés:
- Riasztó rendszer
- Okosredőnyök – távirányított
- beállíthatod, hogy a redőnyök automatikusan fel- vagy lemenjenek bizonyos időpontokban, vagy akár az időjárás vagy más feltételek alapján
- Automatikus, időzített háziállat etető/itató
- Ha kiválasztjuk a kívánt etetési időpontokat és az étel mennyiségét, automatikusan kiadagolja a kiskedvenc számára
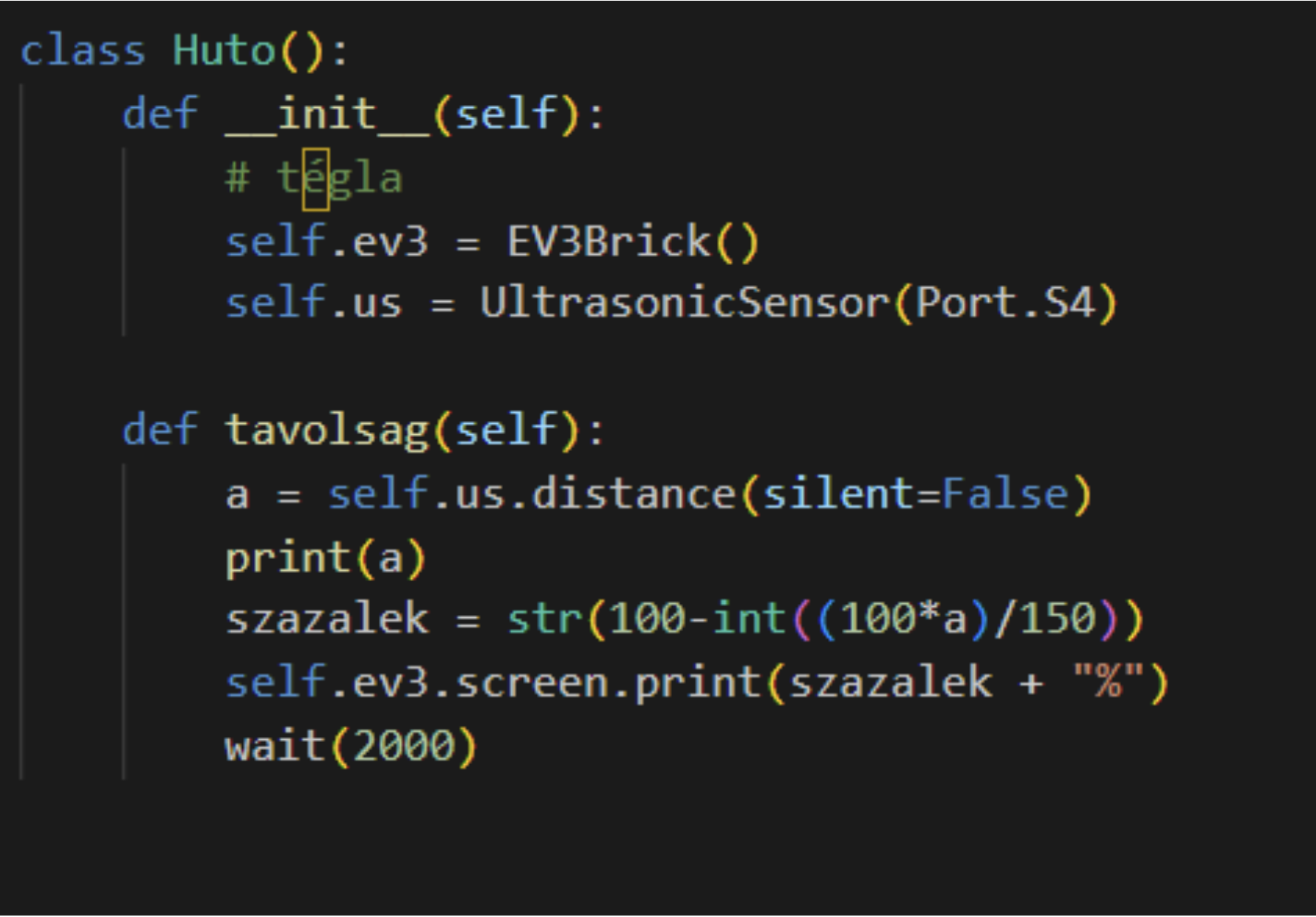
- Okos hűtővíztartáj ellenőrző:
- a vívszint alapján kijelzi, hogy hány százalékon van az adott tartáj
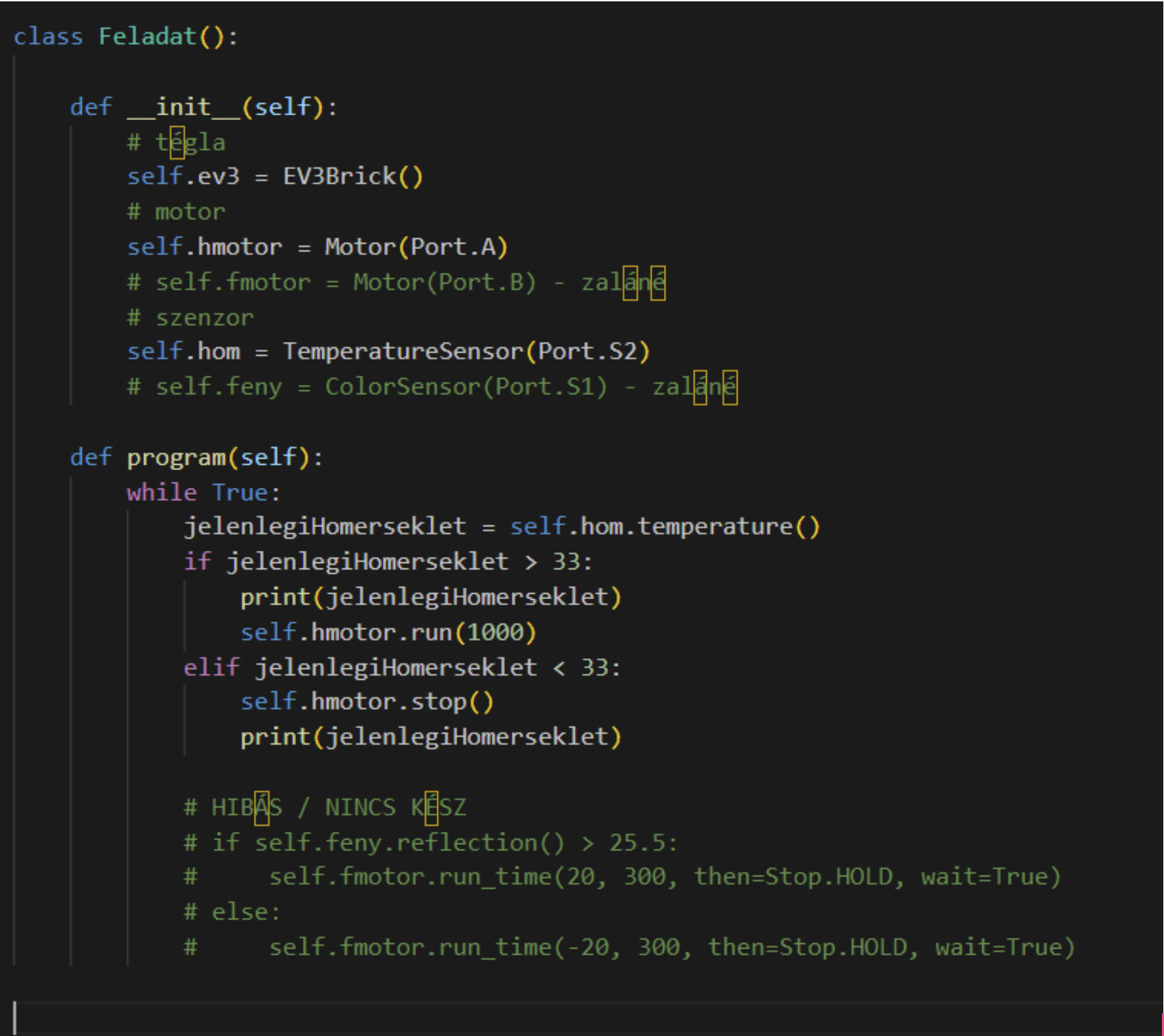
- Hőmérséklet ellenőrző
- Pontos hőmérséklet mérés, szabályzás 0-35 fok között
Technikai fotók és szenzorok beszerelése:



Funkciók leírása, kódja:
Hőmérséklet szabályozó:
Lámpa fel, és lekapcsoló:
Vízszint mérő:
A kész projekt:
Tapasztalatok:
Gergő: Tetszett számomra a feladat annak ellenére hogy sajnos kevés időnk maradt rá. Örültem hogy olyanokkal voltam egy csoportban akikkel ezelőtt is már együtt dolgoztam mert megkönnyítette a feladatot. Csapattársak sokat tudtak segíteni az elképzelés megvalósításában és szerintem én is nekik. A munkánk véleményem szerint nagyon jó lett ahhoz képest hogy kevés idő és semmilyen megelőző tapasztalatunk nem volt ilyen modellezéssel kapcsolatban.
Dominik: Mikor először csapatokra lettünk bontva és mindenki kapott egy beosztást, a beosztás alapján azt gondoltam, hogy bonyolultabb lesz a kommunikáció miatt, de végül sikerült kisebb bukkanókkal megoldani a feladatokat így is. Szerencsésnek érzem, hogy Sella lett a házvezetőnk, lelkiismeretesen csinálta meg a feladatokat, ezért nekünk könnyebb volt a dolgunk.
Szerintem jól teltek az órák és tetszett a feladatoknak az ötlete, csak a megvalósítással voltak gondok. Nem volt jó, hogy minden órának elment a fele azzal, hogy az előző órai állapotunkat vissza tudjuk építeni, miután szétszerelte a többi csoport. Emiatt sokkal kevesebb időnk volt ténylegesen haladni a feladatunkkal. Nehéz úgy megtervezni a házunkat, és a méreteket, amíg nem tudjuk a tényleges méretét a kellő berendezéseknek. Hiába mérjük le a szenzorokat, mivel nem csak egy szenzorból fog állni egy adott funkció, hanem annak a szenzornak lesznek LEGO kiegészítői, így teljesen valótlan volt, hogy először a házat tervezzük meg, majd abba a kellékeket. (A háznak figyelembe kéne vennie a berendezés méreteit, de nem tudjuk azt figyelembe venni, ha még meg se csináltuk, így ez a logika szerintem nem volt megfelelő)
Viki: Nagyon jól dolgoztunk együtt a csapatommal. Amikor elakadtunk mindenki szívesen segített egymásnak. Szerintem jól lettek elosztva a csapatfeladatok. A vezetők is nagyon jól végezték a feladatukat.
Orsi: Szerintem nagyon jól dolgoztunk együtt, tetszett ez a feladat. Jó csapatot kaptam, akikkel egyszerűen tudok együtt dolgozni. Szerettem vezetői pozícióban lenni, azt hiszem nem is ment olyan rosszul, bár nem nekem való feladat de legalább kipróbáltam. az időt picit kevésnek éreztem, de próbáltunk a lehető legtöbbet produkálni az alatt amennyi a rendelkezésünkre áll.